












-
水资源是一个国家生存发展的重要战略资源。我国水资源匮乏,人均水资源量仅为全球平均水平的四分之一[1]。为落实“十四五”规划《纲要》提出的“深入打好污染防治攻坚战,加强大江大河和重要湖泊湿地生态保护治理”要求,国家高度重视水资源、水环境和水生态治理,助力打赢污染防治攻坚战。水体富营养化是人口密集地区常见的一种水体污染现象。叶绿素a可较好地反映水中浮游生物和初级生产力的分布[2],是衡量水体富营养化程度的重要指标[3]。氮、磷是藻类生长的主要限制因子[4],会促进藻类的生长,从而使水体中叶绿素a浓度增加。目前,内陆水体水质监测主要采用实地采样与实验室检测或在线监测的传统方法[5]。尽管这些方法精度较高,但存在成本高、添加化学试剂、安全隐患、监测局限等问题[6]。卫星遥感技术被广泛应用于水质动态监测,具有宏观、动态、经济等优势,弥补了传统地面采样监测方法的缺陷,且效果良好、效率高[7]。卫星遥感技术可通过监测水体反射率来评估水质状况。BRIVIO等[8]应用Landsat卫星的TM (Thematic Mapper) 图像结合辐射传输模型对意大利Garda湖的叶绿素a浓度变化进行研究,发现依据半经验法和光谱与浓度间回归关系建立的模型在叶绿素a浓度高于3.0 mg·m−3的区域具有较好表现;HELLWEGER等[9]利用TM图像中红光波段的反射率反演纽约港的水体浊度,发现浊度与红光反射率相关度较高。然而,卫星遥感传感器一般为多光谱成像光谱仪,其光谱通道数少、影像周期长、空间分辨率低,且易受大气云层影响,无法及时、准确地监测水质污染物浓度[10]。
随着无人机技术的快速发展,利用无人机搭载高光谱成像仪可弥补卫星遥感的诸多不足[11]。高光谱成像仪拥有数百个光谱通道,覆盖全部可见光波段,可补偿多光谱成像仪光谱通道不足,光谱分辨率低的缺陷,在水质监测的领域具有全新、广泛的应用前景[12]。LIU等[13]利用高光谱数据对艾比湖流域地表水进行光谱变换、光谱指数的耦合分析,找到敏感波段,建立了支持向量机模型,反演该流域的地表水中的总氮,发现在680、850和940 nm附近的波段可作为估算干旱区地表水总氮浓度的敏感波段。CAO等[14]利用海河的高光谱反射数据建立BP神经网络模型,反演水体中总氮、总磷等8种水质参数。基于高光谱遥感方法寻找的敏感波段更为准确,模型在验证集上更为鲁棒 。与卫星遥感相比,无人机遥感技术具有灵活方便、响应迅速、高时空分辨率等优点[15],而且即使在恶劣环境下 (如阴天、雾霾) 也能进行低空操作。目前,现有水质遥感研究大都基于单一污染物浓度区域的数据进行建模,使得模型只适用于与研究区水质相近的湖泊或河流,不具有可推广性。
本研究选择一个高浓度和一个低浓度的研究区,以获取更广泛的水质浓度数据,利用地物高光谱仪获取水体区域部分代表性点位连续波段的光谱信息,排除云层的干扰,选取与目标水质参数相关性最大的波段组合,并通过BP神经网络模型建立波段组合和对应水质参数之间最优的数学映射关系,并将无人机高光谱获取的水体影像作为输入,以期更好地反演不同污染物浓度水体的关键水质参数。
-
根据水质情况的差异性,选取低浓度污染物水域 (中山大学珠海校区的沕水湖,22°21′15″N,113°34′24″E) 和高浓度污染物水域 (珠海市唐家湾镇鸡山村的河口区域,22°20′7″N,113°35′30″E) 作为研究区域,于2022年7月在研究区开展实验。其中,沕水湖是内陆湖,受外界干扰小,是低浓度水质代表区域;鸡山村的河口区域存在污水排放的现象,污染物种类多且浓度高,是高浓度水质代表区域。在上述2个研究区分别选定16和30 个均匀分布的监测位点 (图1)。监测位点基本涵盖高低浓度的水体,具有较强的代表性。
-
叶绿素a受光照和温度等环境因素影响较大,因而使用水质仪 (EXO2,YSI,美国) 在现场直接测定。首先在校准杯中倒入一定数量的超纯水或蒸馏水,没过主机末端的探头,对仪器进行校准,校准后将水质仪主机连接上配套软件并在水样中布放,即可在云平台上得到水样叶绿素a浓度。所有点位均记录了对应叶绿素a浓度信息。由于氨氮和磷酸盐浓度无法现场测定,采样点选在沕水湖点号为1、3、4、6、8、10、12、13、14、16的区域,相邻采样点间相距约30 m;鸡山河口点号为1、3、5、7、9、11、13、15、17、18、19、21、23、25、27、29、30的区域,相邻采样点相距约10 m (图1) 。用采样瓶采集水样并标注点号,低温保存带回实验室,使用紫外分光光度计 (DR6000,Hach,美国) 进行测定。根据《水和废水监测分析方法》测定水质指标,其中总氮 (TN) 采用碱性过硫酸钾消解紫外分光光度法;NH4+-N 采用纳氏试剂分光光度法;NO3−-N 采用紫外分光光度法;NO2−-N 采用 N-(1-萘基)-乙二胺光度法[16]。
-
本研究使用便携式地物光谱仪 (FieldSpec 4,ASD,美国,光谱范围350~2500 nm,分辨率1 nm,见图2(a)) 对全部样点进行观测。每次测定前先对环境光进行校准,后将辐射仪的镜头垂直对准标准灰板 (10%~36%反射率) 进行反射率校正,接着将镜头对准目标水面进行采样,单个样点重复采集60次,以均值为该点位的像元亮度值 (DN) 。最后使用后处理软件将DN换算成水体绝对反射率,用于后续相关波段检索和模型建立[17]。
在样点光谱采集的同时,使用飞行无人机 (经纬Matrice 600 Pro,DJI,中国) 搭载高光谱成像仪 (GaiaSky-mini2,双利合谱,中国) (图2 (b) ) ,对中山大学珠海校区沕水湖进行拍摄。无人机飞行高度为500 m,高光谱成像仪光谱为399~1 008 nm,光谱和空间分辨率分别为3.2 nm和0.14 m。执行航行时间为中午12:00,该时间段天气晴朗,无明显云层覆盖。起飞前在研究水域周边铺设标准反射率为30%的灰布,无人机起飞距地面80 m后将成像仪对校准灰布进行拍摄,获取当时工作环境条件的灰布反射率,便于后续去除大气的干扰。拍摄过程中需多次调整摄像头角度,以避免水面反光对区域反射率信息提取的严重干扰[18]。考虑到400~900 nm波段的光谱信息信噪比较高,且与地物高光谱仪稳定波段相对应,选择了该波段,并采用传统的高斯滤波算法[19]对高光谱影像进行加权平滑融合处理。高斯滤波算法的卷积窗口尺寸为(2k+1)×(2k+1),其表达式见式 (1) 。
式中:
$ f\left(i,j\right) $ 为高斯核中$ \left(i,j\right) $ 位置处的元素值,在高光谱影像处理中$ i $ 和$ j $ 取整数,$ \sigma $ 为标准差,k值取1[20]。利用后处理软件对滤波降噪处理后的高光谱影像进行辐射标定、大气校正和地理配准,由于无人机单次飞行拍摄的单张影像已覆盖了整个研究水域,并未进行图像拼接[21],最终通过提取得到经过处理的高光谱影像栅格点的光谱信息。
-
在对波段反射率和其他物理参数进行相关性分析时,以往研究常采用单波段或者波段组合进行分析,其中波段组合主要有双波段差值、双波段比值、双波段归一化、一阶微分等方式[22-23]。本研究主要采用单波段、双波段差值和双波段归一化进行相关性分析,双波段差值和双波段归一化由式 (2) 和 (3) 定义。
式中:
$ \rho \left(i\right) $ 指的是i波段的反射率,$ {\mathrm{C}\mathrm{M}\mathrm{R}\mathrm{F}}_{(i,j)} $ 指的是i波段与j波段的差值组合后的反射率,$ {\mathrm{N}\mathrm{D}\mathrm{S}\mathrm{I}}_{(i,j)} $ 指的是i波段与j波段归一化组合后的反射率。在本研究中,所使用的样本数据具有随机、离散、存在脉冲噪声等特点,且不符合正态分布规律,故选择斯皮尔曼相关性进行分析。斯皮尔曼相关性分析的特点是采用数据的大小顺序来替代数据本身,并以这种替代方式消除量纲,从而避免使用样本数据的均值、方差等指标,在样本数据不满足正态分布情况下提高了分析的稳健性[24]。根据式 (4) 计算单波段或组合波段反射率与目标水质参数之间的斯皮尔曼相关系数
$ {r}_{s} $ 。式中:n为样本数目,di为将波段或组合波段反射率和目标水质浓度按照从小到大赋予等级后两者之间的等级差,斯皮尔曼相关性分析不需要样本满足正态分布。
通过计算单波段、双波段差值和双波段归一化与目标水质参数之间的斯皮尔曼相关系数,分别找出与各自目标水质参数相关性最大的波段组合。
-
目前,大多数水质遥感反演研究采用线性回归模型,以相关性最大的反射率组合作为自变量,水质参数浓度作为因变量,用最小二乘法得出两者之间的线性表达式。然而,水质遥感反演是一个非线性过程,并且受多种因素影响[25]。因此,在水质浓度空间变化较大的水体中,线性模型存在局限性。近年来,人工神经网络因其自学习、较好的容错性和优良的非线性逼近能力,在水质遥感反演领域备受研究者的关注[26-28]。
BP神经网络算法作为一种监督式的自适应学习算法,具有良好的非线性映射能力[29]。其核心步骤分为正向传播和反向传播[30]:沿着网络指向方向乘以权重正向传递给隐藏层,隐藏层通过激活函数得到输出,正向传播算法如式 (5) 所示;计算预测值和观测值之间的误差,并将误差反向传播到隐藏层并调整权重,直至收敛。
式中:x为输入,y为输出,
$ \omega $ 为权重,$ \theta $ 为偏置,f为激活函数,常见激活函数有sigmoid、tansig函数。因此,本研究尝试建立了线性回归模型和BP神经网络模型,以比较并寻找最优的波段组合反射率与水质浓度之间的关系。对于每个水质指标,选取相关性最大的2个波段及其波段组合作为输入,水质浓度作为输出,通过遍历法确定使BP神经网络模型拟合最优的隐层神经元数目,并建立了具有一个隐藏层和最优隐藏神经元数量的BP神经网络模型 (图3) [25]。将样本按照7:3的比例随机划分为训练集和验证集,并利用动态梯度下降方法对模型进行训练,从而建立波段反射率与水质浓度之间的数学映射关系。
通过决定系数R2和相关系数[31] (Correlation coefficient,CC) 分别评价模型在样本集上的精度,评价指标由式 (6) 和 (7) 定义。
式中:n为样本数,
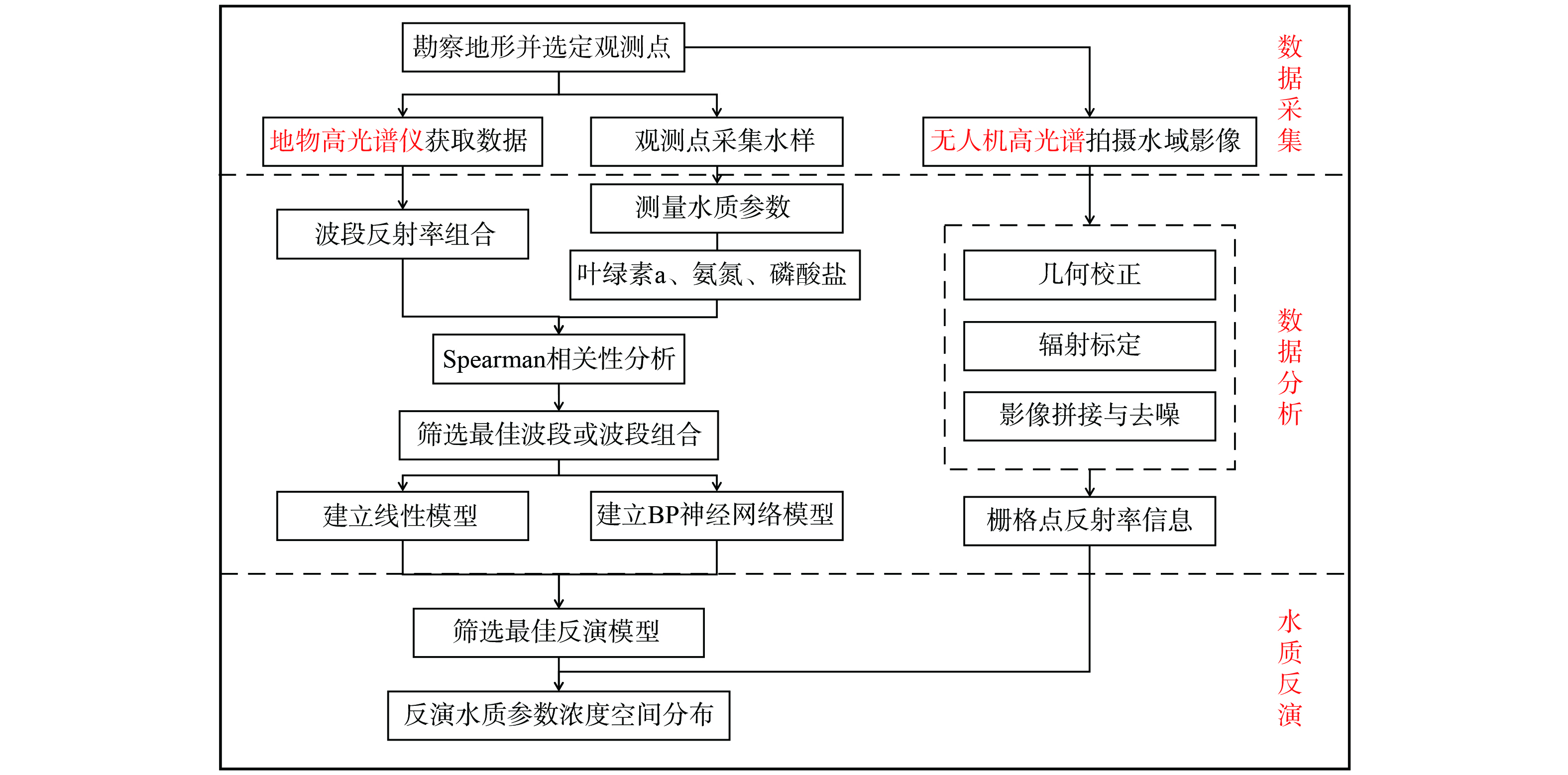
$ {y}_{i} $ 为水质浓度观测值,$ \hat{{y}_{i}} $ 为浓度拟合值,Y为观测浓度平均值,$ \hat{Y} $ 为拟合浓度平均值,$ {\sigma }_{X} $ 、$ {\sigma }_{Y} $ 分别为观测值和拟合值的标准差。R2和CC越接近于1,说明模型精度越高。最后,根据上述评价标准,筛选出各水质参数的最佳反演模型,并将最优的监测模型应用于无人机高光谱影像的反演,绘制出了湖泊的水质参数空间分布图。技术路线如图4所示。 -
2个研究区域的叶绿素a、氨氮和磷酸盐的质量浓度检测结果如图5所示。鸡山叶绿素a质量浓度为0.7~8.3 μg·L−1,氨氮为0.03~1.74 mg·L−1,磷酸盐质量浓度为0.06~0.38 mg·L−1,符合地表Ⅴ类水标准;沕水湖叶绿素a质量浓度为0.4~2.5 ug·L−1,氨氮为0.03~0.74 mg·L−1,磷酸盐为0.08~0.48 mg·L−1,符合地表Ⅴ类水标准。水样水质指标高低层次分明,为后续模型训练提供范围更加宽阔且具有更强代表性的数据。
-
吴延宽等[32]通过分析光谱与水质参数之间的相关关系发现叶绿素a、总氮、总磷、透明度、高锰酸钾指数的敏感波段分别为699、823、399、563、504 nm,这表明叶绿素a、总氮、总磷等常见的水质污染物质量浓度与光谱反射率之间的相关性存在可区分的差异。同时,随着水质污染物质量浓度的增加,敏感波段的反射率发生大幅度变化,这表明不同质量浓度的同一种污染物的光谱反射率也存在差异。因此,可在相关性最大的光谱与水质参数间建立数学映射关系[33-34]。基于此,本研究采用便携式地物光谱仪所采集的光谱数据。波段范围为1 400~1 900 nm,存在大幅度噪声,为减小噪声的干扰,在波段400~1 000 nm选择反射率进行分析。图6 (a) 和 (b) 分别给出了鸡山和沕水湖的样点在波段400~1 000 nm内的水面光谱反射曲线。这表明样点绝对反射率在波段400~500 nm的变化趋势基本一致,光谱反射率较低。这是由于该波段内水体中的叶绿素和其他可溶性有机物的吸收率较高[35];在波段500~950 nm,反射率随波长增加而增加,并出现在720 nm附近的小反射峰。该反射峰通常被认为是判定水体是否含有藻类叶绿素的依据[36]。整体光谱曲线波峰出现在950 nm附近,达到峰值后,反射率随着波长的增加而减小,相关性分析中的相关系数也大幅下降,故不纳入后续模型考虑范围。同时,无人机高光谱获取的沕水湖光谱在波段400~900 nm,反射率变化较为稳定,并存在多个反射峰,有利于建立反射率与水质参数浓度的映射关系。然而,在波段900~1 000 nm,光谱反射率突变值较多,且信息信噪比较低,不适合构建模型。
-
本研究通过计算单波段、双波段差值和双波段归一化与目标水质参数之间的斯皮尔曼相关系数,可以得到单波段相关系数与波段之间的关系 (图7 (a) ) 。结果显示,叶绿素a和磷酸盐与光谱反射率成正相关,相关系数为0.26~0.65,而氨氮与光谱反射率呈正负相关性,其相关系数不高,最大相关系数为0.16。光谱反射率分别按双波段差值、归一化、差值进行组合,与叶绿素a相关分析得到的相关系数显著且2个相关波段的波长差异大于3倍无人机高光谱分辨率的波段组合表达式如式 (8) 所示,氨氮和磷酸盐见式 (9) 和式 (10) 。3种水质参数与对应波段组合的相关系数rs等值图如图7 (b)~(d) 所示。发现采用双波段组合分析得到的最大相关系数大于单波段,对于叶绿素a,648 nm与584 nm波段反射率进行差值组合后与浓度相关性最大,rs为0.73;对于氨氮,774 nm与771 nm波段反射率进行归一化组合后与浓度相关性最大 (rs=0.50) ,但上述波段波长差异过小在应用中难以区分,为此将相关系数较大的814 nm与760 nm波段反射率进行归一化组合,rs为0.47;对于磷酸盐,503与500 nm波段反射率进行差值组合后与浓度相关性最大 (rs=0.69) ,但受限于波长差异,将503 nm与490 nm波段反射率进行差值组合,rs为0.67。上述rs对应的p值均远小于0.01,这表明按照式 (8)~(10) 组合后的波段反射率与对应水质指标浓度在99%的置信水平下显著相关。
-
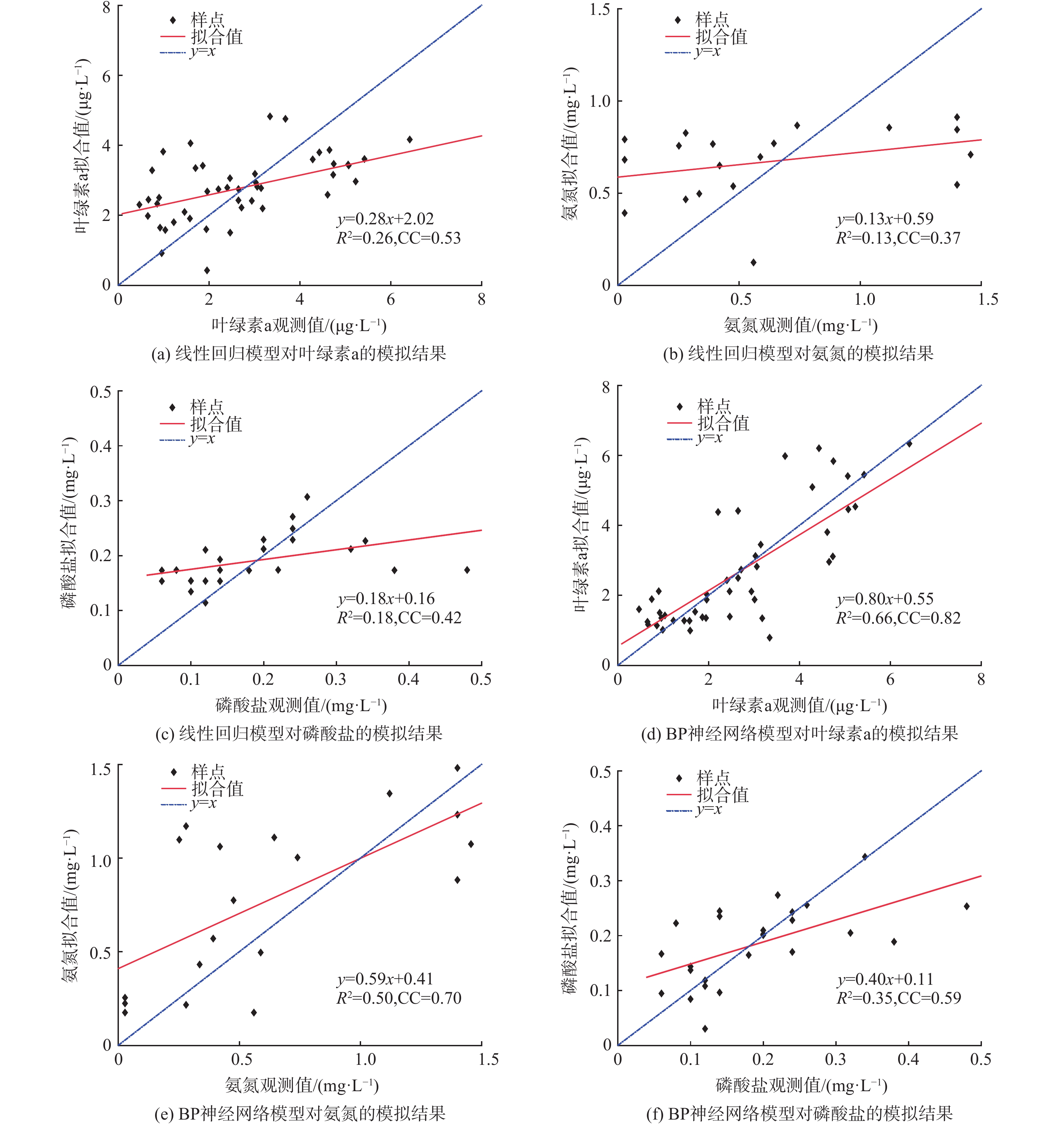
通过相关性分析筛选出与3种水质指标相关系数最高的双波段组合,通过遍历法得到叶绿素a、氨氮、磷酸盐的最优隐藏层神经元数目分别为7、3、8。本研究建立了各水质参数与波段因子之间的线性回归模型和含有最优隐藏层神经元数目的BP神经网络模型,线性回归模型表达式见表1。图8是线性回归模型与BP神经网络模型模拟的结果。从散点图可看出,基于BP神经网络模型的散点分布密集,多数位于在1:1线附近,预测结果更加接近实测值;而线性模型的预测值则出现较大偏差。根据各参数不同评价指标的模拟结果 (图8) 可知,BP神经网络模型的R2为0.35~0.66,CC为0.59~0.82;而线性模型的R2为0.13~0.26,CC为0.37~0.53,均小于BP神经网络模型。这说明BP神经网络模型的精度明显优于线性回归模型,可能是由于波段反射率与水质参数之间的线性关系不显著,线性模型无法完全表征监测值的真实性,而BP神经网络在建立非线性关系上具有其他模型不可比拟的优势。同时,BP神经网络模型对叶绿素a的拟合精度最好,R2=0.66,CC=0.82,明显高于其他2个水质参数。这是由于叶绿素a的样本数多于其他2个水质参数,训练得到的模型鲁棒性更高。基于此,本研究选取BP神经网络模型作为水质反演模型。
-
为研究城市水体的空间分布特征,利用以上建立的反演模型,对沕水湖 (水域长约220 m,宽约150 m,面积约为33 000 m2) 的3种水质指标浓度进行了遥感反演。首先从处理后的沕水湖无人机高光谱影像中提取出各个栅格点的反射率信息,并输入训练好的BP神经网络模型中,即可得到对应栅格点的水质信息。通过下述标准识别异常点:1) 该点水质浓度反演结果小于0;2) 该点水质浓度反演结果与沕水湖采样点水质平均值的差的绝对值大于3倍沕水湖采样点水质标准差 (3σ准则[37]) 。用沕水湖采样点水质平均值替代对异常点的水质质量浓度,并将水质质量浓度可视化,得到目标水质浓度的空间分布 (图10) 所示。反演结果在观测水体水质浓度分布区间内,且与实地监测数据吻合度较高。
图9 (a) 表明,叶绿素a质量浓度在反演图上表现出湖边高、中央低的分布差异。这可能是由于湖泊四周水深较浅,浮游植物和水生植物受太阳辐射的影响大于湖中心区域,近水面的浮游植物和水生植物生长密集,造成叶绿素a质量浓度高。而湖中央水深较大,水生植物 (苦草、金鱼藻、狐尾藻等) 分布较湖边稀疏且大部分生长在水面以下,对光谱反射率的影响较小。图9 (b)~(c) 为沕水湖氨氮和磷酸盐浓度空间分布情况,与叶绿素a相似,湖四周大于湖中心且反演区域右部小块圆形区域 (22°21′15″~22°21′17″N,113°34′24″~113°34′26″E) 出现质量浓度突高。值得注意的是,叶绿素a、氨氮、磷酸盐的高值分布区存在大面积重叠,如反演区域的西北部和南部临岸区域。这是由于氨氮和磷酸盐是水生植物的生长限制性因子[38],其质量浓度分布与水生植物密切相关。在湖泊四周,水深较浅,底泥释放的磷质量浓度高,水中氧气质量浓度充足,植物能充分进行光合作用,浮游植物和水生植物生存繁衍条件极佳[38]。同时底泥中的硝酸盐是植物的主要氮源之一,诱导的发育进程和植物激素的合成与运输相互配合,促进了水生植物的生长[39]。当水体中浮游植物和水生植物大量繁殖时,叶绿素a质量浓度急剧升高,植物生长所产生的分解产物也大量增加,水体氨氮随之上升,从而造成3种目标水质参数呈现相似的空间特征分布。
-
目前,无人机遥感监测水质的探索性研究大部分采用多光谱传感器。但由于多光谱遥感的波段范围小、包含的信息较少,多光谱传感器难以全面反演水质参数变化,特别是对于非光敏化学参数 (如氨氮等) ,预测精度不足以满足反演模型的要求[40-41]。为此,本研究在无人机遥感技术的基础上采用高光谱成像仪,数百个光谱通道覆盖全部可见光波段,极大地提升了水质监测的覆盖空间范围和空间分辨率[42],获取更为全面、准确的敏感波段信息。本文特色在于技术手段、研究对象、模型构建与优化方面。在技术手段方面,以无人机搭载高光谱成像仪为遥感平台,将监测点位的目标水质参数作为研究对象,利用地物高光谱仪直接获取点位连续波段的光谱信息,排除云层的干扰,结合水质监测数据客观评价无人机高光谱遥感数据质量[43],提高反演结果的准确性。
在研究对象方面,由于不同研究区域的光谱反射率信息会受到自然环境、仪器设备等因素的影响[44],目前研究尚缺少针对不同类别水体的水质指标浓度进行无人机遥感反演的适用性强的模型。因此,本研究选取了2个研究区,涵盖了不同水质指标浓度范围,以获得更广泛、更具代表性的目标水质浓度数据,用于构建适用性较强、鲁棒性良好的反演模型,提高其对高低浓度水体的适用性。
在模型构建方面,以往大多数研究采用线性回归模型,但由于大部分水体的遥感反演关系表现为复杂的非线性,故该方法显得不够充分。本研究在传统线性回归模型的基础上,搭建了BP神经网络模型,并通过自适应算法[25]建立敏感波段反射率与目标水质质量浓度间的非线性数学关系,实现了对小型内陆湖泊更为准确的空间浓度反演。然而,本研究中的方法仍存在一些提升空间。1) 实验中的监测位点较少,可能导致构建的神经网络模型存在欠拟合,未来可将更多的湖泊或河流纳入观测区域,以增加样本体积[45]。2) 在相关性分析阶段,本研究只分析了单波段和部分双波段组合的相关性,并未探究是否存在相关系数更大且波段数大于3的组合[35],这也为线性模型的精度较低提供了可能的原因[46]。因此,在未来的研究中,应考虑添加更多特征波段,但是多波段组合分析可能对计算机硬件要求更高,需要增加硬件设备成本。3) 缺乏对模型在不同季节或天气情况下的适用性研究,但孙亚楠等[47]通过利用高光谱分析不同季节盐分的差异性,将反演模型适用时间分为春秋两季,提高了反演模型的准确度。因此,在后续的研究中,应增加数据样本在时间分布上的广度,实现对目标水体进行长时间的观测。4) 本研究中的水质反演模型构建基于实测点采集的数据,但为了研究多种质量浓度梯度下水样的光谱,可通过实验室配比测量等手段预先进行模型预构建,以辅助特征波段的选取,从而实现更高的建模效率[29, 48]。5) 无人机高光谱与地物高光谱相配合是可实现对天空光的扣除,但本研究并未从传感器获得的遥感数据中去除天空光信号,而是直接利用包含天空光的总遥感反射率进行建模,这与现有的大部分无人机遥感研究[17, 35]一致。在未来,希望将仅包含水体信息的真实水体光谱数据分离出来,使用真实水体光谱数据构建水质反演模型,并与本文未扣除天空光的模型进行对比,以此来探索精度是否有提升甚至大幅度提升。
综合来看,无人机高光谱水质监测技术填补了传统方法不足,已在实际场景中得到越来越广泛应用[49-52]。鉴于本研究中的水质反演模型能快速实现大面积水质浓度分布可视化,具有进一步完善与推广的价值。
-
1) 利用地物高光谱仪获取样点的光谱信息,通过斯皮尔曼相关性分析发现双波段最大相关系数大于单波段,且寻找到与水质浓度相关性显著且2个相关波段的波长差异大于3倍无人机高光谱分辨率的双波段组合:叶绿素a为648 nm与584 nm波段差值,氨氮为814 nm与760 nm波段归一化,磷酸盐为503 nm与490 nm波段差值。
2) 通过对比线性模型和BP神经网络模型2组模型,建立波段组合反射率与水质参数之间最优的数学映射关系。基于BP神经网络所构建的水质模型能得到较好的反演精度 (R2=0.35~0.66,CC=0.59~0.82) 。
3) 将以上构建的BP神经网络水质反演模型应用于无人机高光谱采集的影像后,能实现大面积水域水质浓度反演。3种水质参数的空间浓度分布有一定的关联性,能较好地反映目标参数在水域中的真实分布情况。
基于无人机高光谱和BP神经网络的城市水体污染监测
Water pollution monitoring based on unmanned aerial vehicle (UAV) hyperspectral and BP neural network
-
摘要: 我国大多数流域存在不同程度的水体污染,城市水体污染防治与监测是一项艰巨而漫长的任务,而传统水质监测和卫星遥感方法在水体面积较大、水流运动不稳定、周边地形复杂的河流或城市湖泊的水质监测表现为适用性差、准确度低。基于无人机的高光谱遥感技术具有覆盖范围广、数据获取快速等特点,对城市水体污染监测具有一定的应用价值。以珠海市城市水域为研究对象、无人机高光谱数据为数据源,利用线性回归模型和BP (Back Propagation) 神经网络模型方法,分别建立了波段组合反射率与水体叶绿素a、氨氮和磷酸盐3种水质指标之间的最优反演模型,并通过实际样品验证了该模型在城市水体中的适用性。该研究结果不仅为大数据驱动的水质分析提供了重要的技术支持,也为无人机技术应用于城市水体污染程度评价和动态监测提供新方法。Abstract: Water pollution is a common issue to most basins in China. Pollution prevention and monitoring of urban water are an arduous and lengthy task. It is a great challenge to conduct water quality monitoring in rivers or urban lakes with large surface areas, unstable water flow, complex surrounding terrain by traditional water quality monitoring and satellite remote sensing for their poor applicability and low accuracy. Unmanned Aerial Vehicle (UAV)-based hyperspectral remote sensing technology has wide coverage and fast data acquisition, and is applicable to urban water pollution monitoring. The present study takes urban waters of Zhuhai City as the research object, and uses UAV hyperspectral data as the data source. By processing the hyperspectral images, a linear model and a Back Propagation (BP) neural network model were established to simulate the optimal mathematical mapping between the combined reflectance of the waveband and the key water quality parameters (chlorophyll a, ammonium, phosphate). The applicability of the models in urban water bodies was demonstrated by actual samples, providing a new method for urban water pollution evaluation and dynamic monitoring. The findings not only provide important technical support for big-data-driven water quality analysis, but also for urban water pollution monitoring using UAV remote sensing technology.
-

-

图 1 研究区域与样点示意图
Figure 1. Geographic location of the study areas and spatial distribution of sample points
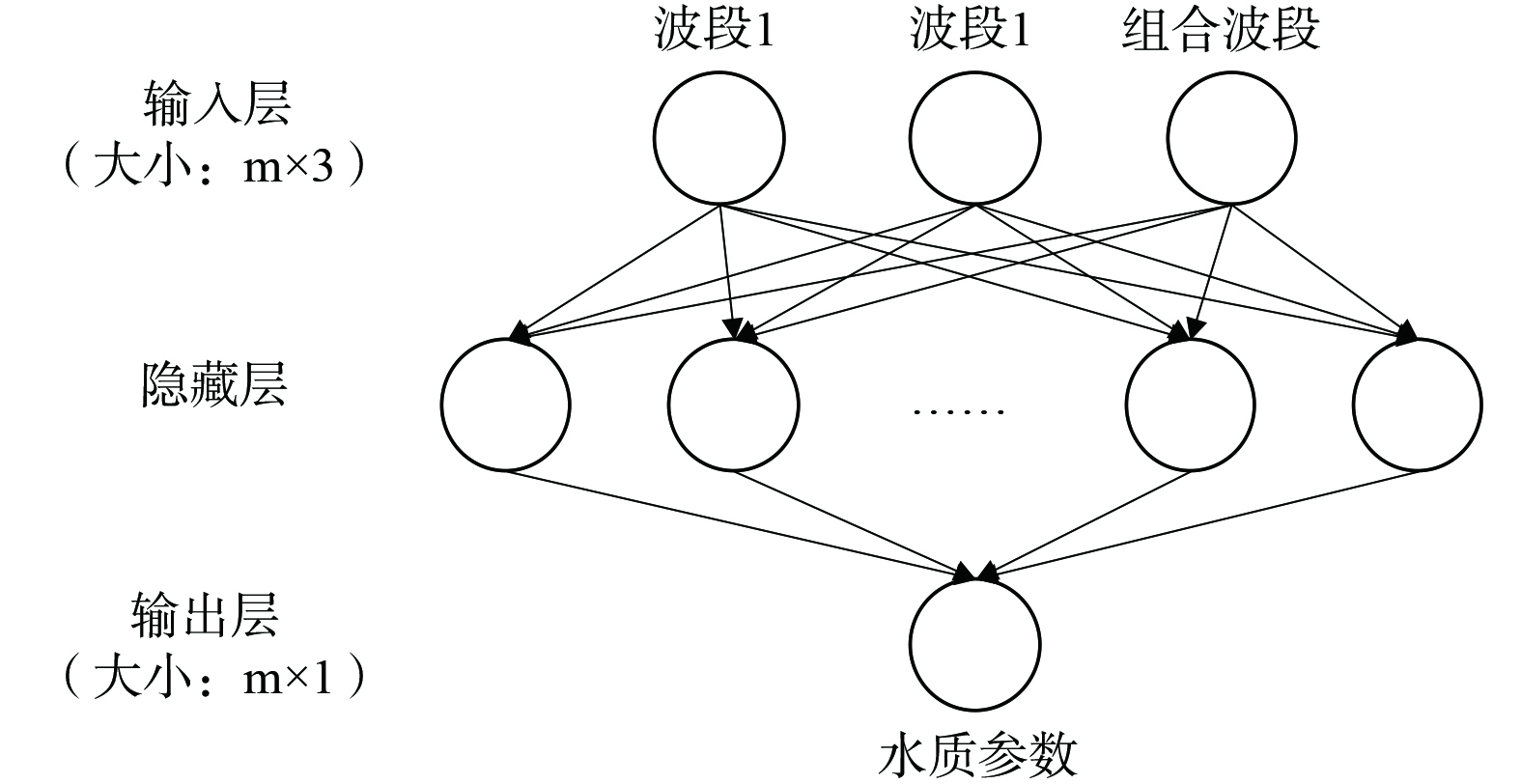
图 3 单个水质参数的BP神经网络结构,m代表不同水质参数的样本数量
Figure 3. BP neural network structure for each water quality parameter, and m stands for the sample number

图 5 研究区域样本目标水质指标箱型图
Figure 5. Box diagram of target water quality parameters of samples

图 6 地物高光谱仪采集的样点光谱数据
Figure 6. Spectral reflectance of the sampling points collected by FieldSpec 4

图 9 目标水质参数浓度空间反演分布图
Figure 9. The spatial inversion of target water quality parameters
表 1 水质指标浓度与最佳组合波段的线性表达式
Table 1. Linear expression for the concentration of water quality and optimal combined band
水质指标 (单位) 回归表达式 叶绿素a (μg·L−1) $ \mathrm{C}\mathrm{H}\mathrm{L}=432.5\times \left(\rho \left(648\right)-\rho \left(584\right)\right)+0.4827 $ 氨氮 (mg·L−1) $ \mathrm{N}{\mathrm{H}}_{4}^{+}-\mathrm{N}=13.45\times \dfrac{\rho \left(814\right)-\rho \left(760\right)}{\rho \left(814\right)+\rho \left(760\right)}+0.0603 $ 磷酸盐 (mg·L−1) $ \mathrm{P}{\mathrm{O}}_{4}^{3-}=96.8\times \left(\rho \left(503\right)-\rho \left(490\right)\right)+0.0772 $  下载: 导出CSV
下载: 导出CSV
-
[1] 李茂静. 中国水污染现状及对策分析[J]. 化工管理, 2019, 1(6): 16. [2] 黄灵光, 方豫, 张大文, 等. 基于 Landsat-8 OLI 的鄱阳湖叶绿素 a 浓度定量反演[J]. 江西科学, 2016, 34(4): 441-444. [3] CHAI C, YU Z, SONG X, et al. The status and characteristics of Eutrophication in the Yangtze River (Changjiang) estuary and the adjacent east China Sea, China[J]. Hydrobiologia, 2006, 563(1): 313-328. doi: 10.1007/s10750-006-0021-7 [4] 付春平, 钟成华, 邓春光. 水体富营养化成因分析[J]. 重庆建筑大学学报, 2005, 27(1): 128-131. [5] 侯迪波, 张坚, 陈泠, 等. 基于紫外-可见光光谱的水质分析方法研究进展与应用[J]. 光谱学与光谱分析, 2013, 33(7): 1839-1844. [6] 张立福, 张琳姗, 孙雪剑, 等. 星地协同水质光谱在线监测系统及应用研究[J]. 全球变化数据学报 (中英文), 2021, 5(1): 114-123. [7] 吴煜晨. 基于 MODIS 遥感数据源的内陆水体叶绿素 a 浓度反演算法综述[J]. 江西水利科技, 2017, 43(1): 14-18. [8] BRIVIO P, GIARDINO C, ZILIOLI E. Determination of chlorophyll concentration changes in Lake Garda using an image-based radiative transfer code for Landsat TM images[J]. International Journal of Remote Sensing, 2001, 22(2-3): 487-502. doi: 10.1080/014311601450059 [9] HELLWEGER F, SCHLOSSER P, LALL U, et al. Use of satellite imagery for water quality studies in New York Harbor[J]. Estuarine, Coastal and Shelf Science, 2004, 61(3): 437-448. doi: 10.1016/j.ecss.2004.06.019 [10] 李瑶. 内陆水体水色参数遥感反演及水华监测研究 [D]. 北京: 中国科学院大学, 2017. [11] LIU H, YU T, HU B-L, et al. UAV-Borne hyperspectral imaging remote sensing system based on acousto-optic tunable filter for water quality monitoring[J]. Remote Sensing, 2021, 13(20): 4069. doi: 10.3390/rs13204069 [12] 徐岩, 张聪伶, 降瑞娇, 等. 无人机高光谱影像与冠层树种多样性监测[J]. 生物多样性, 2021, 29(5): 647-660. doi: 10.17520/biods.2021013 [13] LIU C, ZHANG F, GE X, et al. Measurement of total nitrogen concentration in surface water using hyperspectral band observation method[J]. Water, 2020, 12(7): 1842. doi: 10.3390/w12071842 [14] CAO Q, YU G, SUN S, et al. Monitoring water quality of the Haihe river based on ground-based hyperspectral remote sensing[J]. Water, 2021, 14(1): 22. doi: 10.3390/w14010022 [15] 李德仁, 李明. 无人机遥感系统的研究进展与应用前景[J]. 武汉大学学报(信息科学版), 2014, 39(5): 505-513. [16] RICE E W, BRIDGEWATER L, ASSOCIATION A P H. Standard methods for the examination of water and wastewater [M]. American Public Health Association Washington, DC. 2012: 4500-5910. [17] 刘梅, 马启良, 原居林, 等. 基于无人机高光谱遥感技术对内陆养殖池塘水质监测的研究[J]. 海洋与湖沼, 2022, 53(1): 195-205. doi: 10.11693/hyhz20210600133 [18] 李丹, 吴保生, 陈博伟, 等. 基于卫星遥感的水体信息提取研究进展与展望[J]. 清华大学学报(自然科学版), 2020, 60(2): 147-161. [19] 李健, 丁小奇, 陈光, 等. 基于改进高斯滤波算法的叶片图像去噪方法[J]. 南方农业学报, 2019, 50(6): 1385-1391. [20] 朱治青, 苏远超, 李朋飞, 等. 双约束深度卷积网络的高光谱图像空谱解混方法[J]. 信号处理, 2023, 39(1): 128-142. doi: 10.16798/j.issn.1003-0530.2023.01.013 [21] 郑迪, 沈国春, 王舶鉴, 等. 基于无人机高光谱影像和深度学习算法的长白山针阔混交林优势树种分类[J]. 生态学杂志, 2022, 41(5): 1024-1032. doi: 10.13292/j.1000-4890.202203.004 [22] 马启良, 原居林, 张爱华, 等. 基于无人机高光谱技术的水质预测反演系统设计与实现[J]. 湖州师范学院学报, 2022, 44(2): 56-62. doi: 10.3969/j.issn.1009-1734.2022.02.010 [23] 闻建光, 肖青, 杨一鹏, 等. 基于 Hyperion 数据的太湖水体叶绿素 a 浓度遥感估算[J]. 湖泊科学, 2006, 18(4): 327-336. doi: 10.3321/j.issn:1003-5427.2006.04.002 [24] SHEVLYAKOV G L, VILCHEVSKI N O. Robustness in data analysis: Criteria and methods [M]. Walter De Gruyter. 2011: 181-207. [25] 岳佳佳, 庞博, 张艳君, 等. 基于神经网络的宽浅型湖泊水质反演研究[J]. 南水北调与水利科技, 2016, 14(2): 26-31. [26] 余楚, 吕敦玉. 利用BP神经网络模型进行分类径流模拟[J]. 南水北调与水利科技, 2014, 12(5): 109-112. doi: 10.13476/j.cnki.nsbdqk.2014.05.025 [27] 顾亮, 张玉超, 钱新, 等. 太湖水域叶绿素a浓度的遥感反演研究[J]. 环境科学与管理, 2007, 32(6): 25-29. doi: 10.3969/j.issn.1673-1212.2007.06.008 [28] DALL'OLMO G, GITELSON A A, RUNDQUIST D C, et al. Assessing the potential of SeaWiFS and MODIS for estimating chlorophyll concentration in turbid productive waters using red and near-infrared bands[J]. Remote Sensing of Environment, 2005, 96(2): 176-187. doi: 10.1016/j.rse.2005.02.007 [29] 邹宇博. 水质高光谱遥感反演模型建立及优化研究 [D]. 北京: 中国科学院大学, 2022. [30] 陈志高, 吴子豪, 班亚, 等. 基于调和分析及VMD-BP神经网络的感潮河段流量预报[J]. 武汉大学学报(信息科学版), 2023, 48(8): 1389-1397. [31] 樊志强, 王志国, 黄平平, 等. 基于高光谱影像湖泊叶绿素a浓度反演分析[J]. 生态科学, 2023, 42(1): 121-128. doi: 10.14108/j.cnki.1008-8873.2023.01.014 [32] 吴廷宽, 贺中华, 梁虹, 等. 基于高光谱技术的湖泊富营养化综合评价研究——以贵阳市百花湖为例[J]. 水文, 2016, 36(2): 28-34. [33] 邢前国. 珠江口水质高光谱反演 [D]. 北京: 中国科学院大学, 2007. [34] 杨一鹏, 王桥, 王文杰, 等. 水质遥感监测技术研究进展[J]. 地理与地理信息科学, 2004, 20(6): 6-12. [35] 杨振, 卢小平, 武永斌, 等. 无人机高光谱遥感的水质参数反演与模型构建[J]. 测绘科学, 2020, 45(9): 60-64. [36] 疏小舟, 尹球, 匡定波. 内陆水体藻类叶绿素浓度与反射光谱特征的关系[J]. 遥感学报, 2000, 4(1): 41-45. [37] JIAYU Z, SHIWEI X, YANG L, et al. Supply and demand forecasting model of multi-agricultural products based on deep learning[J]. Smart Agriculture, 2022, 4(2): 174. [38] 谢雄飞, 肖锦. 水体富营养化问题评述[J]. 四川环境, 2000, 19(2): 22-25. doi: 10.3969/j.issn.1001-3644.2000.02.006 [39] 刘文平, 梁烜赫, 张春宵, 等. 植物氮素利用途径中硝酸盐转运基因的研究进展[J]. 中国土壤与肥料, 2022, 1(7): 238-246. doi: 10.11838/sfsc.1673-6257.21236 [40] 李俊生. 高光谱遥感反演内陆水质参数分析方法研究——以太湖为例 [D]. 北京: 中国科学院研究生院, 2007. [41] 张兵, 申茜, 李俊生, 等. 太湖水体 3 种典型水质参数的高光谱遥感反演[J]. 湖泊科学, 2009, 21(2): 182-192. [42] 殷伟庆. 无人机巡航和水质反演分析在河流环境监测中的应用[J]. 环境与发展, 2021, 33(3): 167-172. [43] 郭伟, 朱耀辉, 王慧芳, 等. 基于无人机高光谱影像的冬小麦全蚀病监测模型研究[J]. 农业机械学报, 2019, 50(9): 162-169. doi: 10.6041/j.issn.1000-1298.2019.09.018 [44] ROMERO-TRIGUEROS C, NORTES P A, ALARCóN J J, et al. Effects of saline reclaimed waters and deficit irrigation on Citrus physiology assessed by UAV remote sensing[J]. Agricultural Water Management, 2017, 183(1): 60-69. [45] 何同弟, 李见为, 黄鸿. 基于GA优选参数的SVR水质参数遥感反演方法[J]. 光电工程, 2010, 37(8): 127-133. [46] 杜聪, 王世新, 周艺, 等. 利用Hyperion高光谱数据的三波段法反演太湖叶绿素a浓度[J]. 环境科学, 2009, 30(10): 2904-2910. doi: 10.3321/j.issn:0250-3301.2009.10.015 [47] 孙亚楠, 李仙岳, 史海滨, 等. 基于多源数据融合的盐分遥感反演与季节差异性研究[J]. 农业机械学报, 2020, 51(6): 169-180. doi: 10.6041/j.issn.1000-1298.2020.06.018 [48] 田欣. 高光谱图像的去噪模型与算法 [D]. 长沙: 湖南大学, 2019. [49] YONES M S, MA'MOUN S A M, FARAG R M A, et al. Hyperspectral application for early diagnosis of American foulbrood disease in the honeybee (Apis mellifera L. ) larvae[J]. The Egyptian Journal of Remote Sensing and Space Science, 2019, 22(3): 271-277. doi: 10.1016/j.ejrs.2019.05.002 [50] 冯天时, 庞治国, 江威, 等. 高光谱遥感技术及其水利应用进展[J]. 地球信息科学学报, 2021, 23(9): 1646. doi: 10.12082/dqxxkx.2021.200746 [51] PENGFEI L, PENG T, YINJUN Z, et al. Application analysis of shale gas core hyperspectral in weican-1 well[J]. E3S Web of Conferences, 2021, 248(1): 03018. [52] KNEIFEL F, WAGNER T, FLAMMANG I, et al. Hyperspectral imaging for viability assessment of human liver allografts during normothermic machine perfusion[J]. Transplant Direct, 2022, 8(12): e1420. doi: 10.1097/TXD.0000000000001420 -
 点击查看大图
点击查看大图
计量
- 文章访问数: 2931
- HTML全文浏览数: 2931
- PDF下载数: 68
- 施引文献: 0
















